Navigation vents
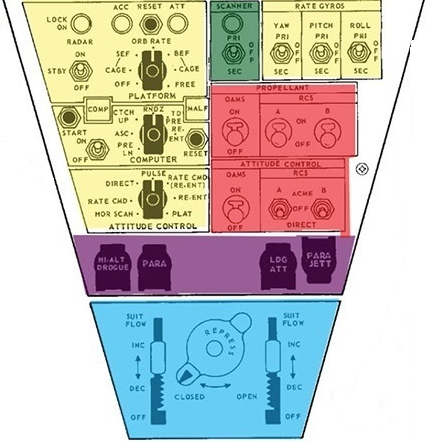
PLATFORM Cage Mode 2 Position
The CAGE position is used for IMU warm-up and to align the platform gimbals with spacecraft body axes. Platform gimbals are caged prior to fine alignment with the horizon sensors. In the CAGE mode, gimbals are torqued by synchro outputs until a null is obtained on the synchro. When synchro outputs reach null, torqueing stops and the gimbals are aligned with spacecraft axes.
The second CAGE mode allows the platform to be caged in blunt end forward without switching back through other modes. mode is used during launch and re-entry phases.Horizon sensor pitch and roll outputs are compared with synchro outputs and the difference used to torque gimbals. When synchro and horizon sensor outputs are balanced the gimbals are aligned to earth local vertical. A gyro compass loop aligns the yaw gimbal with the orbit plane.
NOTE: If horizon sensors lose track during either SEF or BEF alignment modes, the platform is automatically switched to ORB RATE mode.